Here's the concept - simple build, motor cost in the ~$500AUD range (plus elbow grease and/or machinists fees). Built on the pattern of the CSIRO motor (http://www.csiro.au/resources/pf11g.htm), but with a somewhat lower operating frequency (about a quarter, in fact), as I can't be bothered mucking about with litz wire...
Rotor:
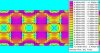
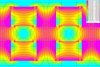
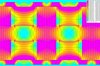
- Twin 36-pole Halbach array (144 magnets to mount )
)
- NIB N42 1/2" x 1/4" x 1/4" magnets
- Standard 6-bolt brake discs as both stator mounting and magnetic backing (Halbach array isn't perfect, there's still a few stray field lines to catch)
- Mounts directly to a disc brake hub
- O.D. of magnets is ~170mm, meaning the magnets may need a touch of grinding into wedginess, to fit nicely... or I just let them hang out a couple of mm...
- Pole to pole gap ~5mm
- Aluminium spacer to keep the poles apart, vented at the periphery for cooling
Stator:
- Double-wave wound (to keep the flux nicely confined) around an inert core about 2mm thick - putting the conductors in the airflow and near the magnets, and leaving the middle of the gap (where flux is weakest) for the core...
- Mounted to hub via a nice big bearing which fits outside the disc brake bolts - I'm thinking a 6812 or thereabouts. Large diameter bearing should make it easier to eliminate play and shorten the air gap
- Held stationary to the frame by a bolt-on arm, which also allows for some frame flex.
Magnets (and rotors) are already on the way so it's a bit late to change the pole spacing, but I'm interested to know anyone else's experience in building this manner of motor...
Rotor:
- Twin 36-pole Halbach array (144 magnets to mount
)- NIB N42 1/2" x 1/4" x 1/4" magnets
- Standard 6-bolt brake discs as both stator mounting and magnetic backing (Halbach array isn't perfect, there's still a few stray field lines to catch)
- Mounts directly to a disc brake hub
- O.D. of magnets is ~170mm, meaning the magnets may need a touch of grinding into wedginess, to fit nicely... or I just let them hang out a couple of mm...
- Pole to pole gap ~5mm
- Aluminium spacer to keep the poles apart, vented at the periphery for cooling
Stator:
- Double-wave wound (to keep the flux nicely confined) around an inert core about 2mm thick - putting the conductors in the airflow and near the magnets, and leaving the middle of the gap (where flux is weakest) for the core...
- Mounted to hub via a nice big bearing which fits outside the disc brake bolts - I'm thinking a 6812 or thereabouts. Large diameter bearing should make it easier to eliminate play and shorten the air gap
- Held stationary to the frame by a bolt-on arm, which also allows for some frame flex.
Magnets (and rotors) are already on the way
so it's a bit late to change the pole spacing, but I'm interested to know anyone else's experience in building this manner of motor...
Last edited: